Jupyter Notebooks for Mini Pupper
- Jupyter Notebooks to control Mini Pupper
- Dockerfiles to launch Jupyter Noteobooks with RoboStack/jupyter-ros
ROSCon2022 Mini Pupper workshop slide: https://docs.google.com/presentation/d/1blwnOdjrrUGisGahi4SSabyXjQmaVHE_ntHNChsot48/edit?usp=sharing
| LiDAR Scan Visualization | Object Following |
|---|---|
 |
 |
- Mini Pupper
- with Raspberry Pi 4
- Ubuntu 20.04 required
- ROS Noetic required
ros-noetic-rosbridge-server,ros-noetic-tf2-web-republisheris required for this project
- 6GB or more free space in storage required to save docker image (32GB SD-card recommended)
- with LD06 LiDAR (optional)
- with Camera (optional)
- USB Web Camera and OAK-D-Lite are both OK
- with Raspberry Pi 4
- Laptop
- Google Chrome required (not tested on other browsers)
- SSH Client
NOTE: ROS setup for laptop is not required for this tutorial

ubuntu-20.04.5-preinstalled-server-arm64+raspi.img.xz is recommended.
https://cdimage.ubuntu.com/releases/20.04/release/
Follow the official document.
https://github.com/mangdangroboticsclub/mini_pupper_bsp
Install ROS.
git clone https://github.com/Tiryoh/ros_setup_scripts_ubuntu.git
cd ros_setup_scripts_ubuntu
./ros-noetic-ros-base.sh
Install ROS package for this project.
sudo apt install ros-noetic-rosbridge-server ros-noetic-tf2-web-republisher
Install ROS packages for Mini Pupper.
Follow mini_pupper_ros official document.
https://github.com/mangdangroboticsclub/mini_pupper_ros
NOTE: ROS setup for laptop is not required for this project.
sudo apt install docker.io
sudo usermod -aG docker $USERIf you need the latest docker, follow the official document.
https://docs.docker.com/engine/install/ubuntu/#install-using-the-convenience-script
Download this project with git clone command.
cd ~/dev/
git clone https://github.com/Tiryoh/mini-pupper-jupyter-notebooks.gitThere are 2 ways to prepare docker image.
Using pre-built image is easier.
A. Download the pre-built image (recommended)
docker pull ghcr.io/tiryoh/conda-jupyter-ros:noeticB. Build docker image (optional)
cd ~/dev/mini-pupper-jupyter-notebooks/docker/conda-jupyter-ros
./build.shLogin Mini Pupper's Raspberry Pi via SSH and run run.sh.
cd ~/dev/mini-pupper-jupyter-notebooks
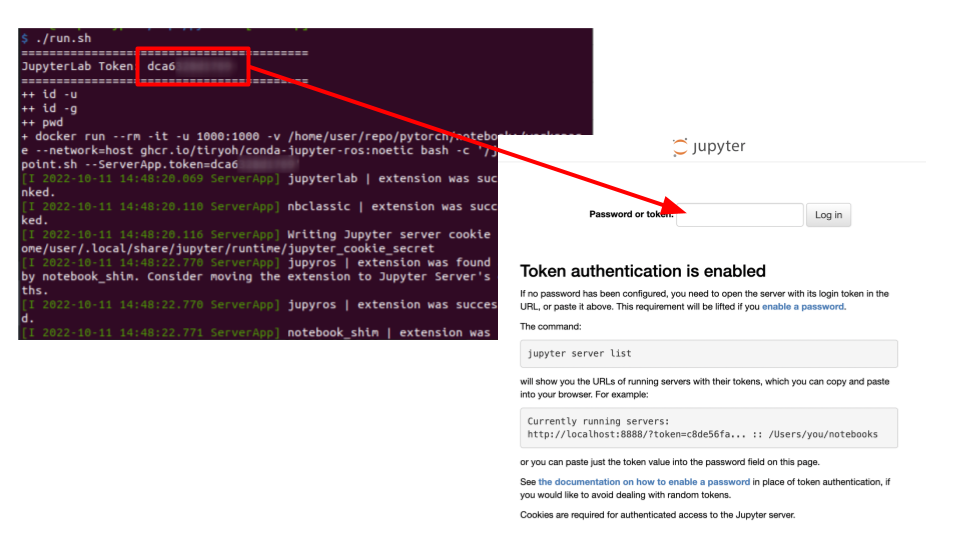
./run.shAfter starting the run.sh, it shows JupyterLab token.
Access $IP_ADDRESS:8888 from the laptop via web browser and input the token.
For example, if the IP address of the Raspberry Pi is 192.168.10.12, access http://192.168.10.12:8888.

mini_pupper_object_following_demo_1.mp4
MIT License