









When working with small targets, simple log outputs are often the only feedback available. With CodeOrb on the PC and the SystemCore on the target, we have two additional channels: a task viewer and a command interface. The task viewer provides a detailed insight into the entire system, whereas the command interface gives full control over the microcontroller.
CodeOrb is essentially a multiplexer service running on the PC that transmits and receives these three channels of information via UART from and to the microcontroller. The channels can then be viewed on the PC or over the network using a Telnet client such as PuTTY.
- Full control over target
- Crystal-clear insight into the system
- Through three dedicated channels
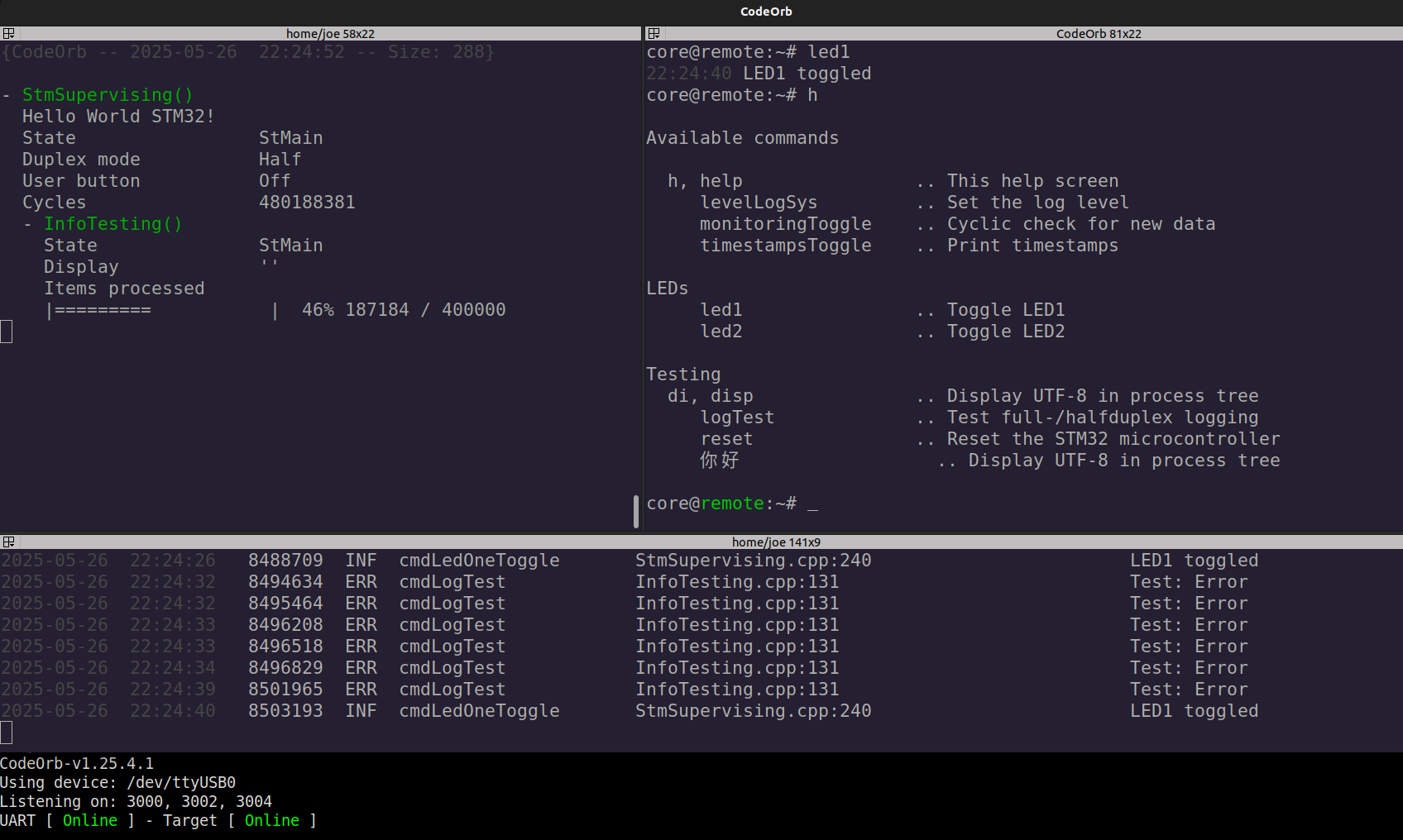
- Process Tree
- Log
- Command Interface
This repository provides CodeOrb the microcontroller debugger highlighted in orange. Check out the example for STM32 as well!

TODO: Separate README file
Meanwhile: Check out the example for STM32
On Windows
.\CodeOrb.exe -d COM1
On UNIX systems
./codeorb -d /dev/ttyACM0
The output should look like this

As soon as the multiplexing service CodeOrb has been started you can connect to the channels via Telnet. You can use IPv4 or IPv6
For the Process Tree
telnet :: 3000
For the Log
telnet :: 3002
For the Interactive Command Interface
telnet :: 3004
You will need meson and ninja for the build. Check the instructions for your OS on how to install these tools.
Clone repo
git clone https://github.com/NoOrientationProgramming/code-orb.git --recursive
Enter the directory
cd code-orb
Setup build directory
meson setup build-native
Build the application
ninja -C build-native